-
NAS Upgrade
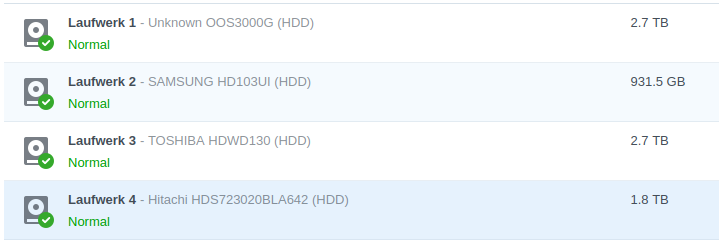
Lange werkelte hier im Haus eine Synology DS426j. Nicht das Beste Modell, aber damals, als es gekauft wurde, eine gute bezahlbare Option. Was mit 3x 1 TB als Festplatten anfing mutierte schnell in eine komische Konstellation. Der Screenshot zeigt das ganz gut. Gute 9 TB, wobei ich die vierte Platte nachträglich einbaute und ich sie […]
-
Es shreddert der Shredder schlecht
Vor über 10 Jahren legten wir uns einen Shredder zu. Was billiges, ähnlich diesem hier. Der kam eigentlich nur ein mal im Jahr zum Einsatz. Nach dem Jahreswechsel, dann, wenn Dokumente älter 10 Jahre mit personenbezogenen Daten etwas schwieriger wieder zusammenzupuzzeln sein sollten. Über die Jahre shredderte er immer schlechter, blieb hängen oder lief einfach […]
-
Tic Tac Toe
In einem Python-Grundkurs war eine Aufgabe ein Tic Tac Toe zu programmieren. Da lag der Gedanke nicht fern, das als kleines Web-Spiel auf PHP zu übertragen. Sicher gibt es da schon einige, aber selbst gebastelt zur Übung ist eben doch was anderes. Der Spieler klickt seine Wahl an, der Computer errechnet sich seine Chancen und […]
-
Schere – Stein – Papier
In einem Python-Grundkurs war eine Aufgabe ein Schere – Stein – Papier zu programmieren. Da lag der Gedanke nicht fern, das als kleines Web-Spiel auf PHP zu übertragen. Sicher gibt es da schon einige, aber selbst gebastelt zur Übung ist eben doch was anderes. Der Spieler klickt seine Wahl an, der Computer wählt per Zufall. […]
-
Hearthstone auf Kubuntu
Lange lief hier Kubuntu 23.04 mit Wayland. Mit Lutris hatte ich battle.net installiert und damit dann Hearthstone. Das lief. Recht problemlos, manchmal hing es direkt beim Start aber der zweite Versuch klappte dann immer. Jetzt kam das Update auf 23.10. Ein Backup hatte ich, was sollte schon schief gehen. Alles lief, wirklich, alles. Außer Hearthstone. […]
-
Linux-Tablet aus altem Huawei MateBook
Seit einiger Zeit liegt hier ein Huawei MateBook HZ-W09 rum. Das ist etwa von 2020, ich hätte es für noch älter gehalten, und ist eigentlich ein Tablet mit Anstecktastatur. Doch es läuft Windows 10 drauf, hat einen Intel m3 Prozessor, 4 GB Arbeitsspeicher immerhin und eine 128 GB SSD. Windows nervte immer mehr, auch wenn […]
-
Heizungsthermostat-Update
Im ersten Artikel zu Home Assistant hatte ich schon angesprochen, dass hier die Heizung teilweise mit einer Bosch-Smart-Home-Plattform läuft. In einem weiteren hatte ich dann auch schon das erste Zigbee-Thermostat getestet, um nicht nur im Wohnzimmer, sondern auch im Schlafzimmer endlich Smart zu werden. Hier habe ich mich dann doch für ein weiteres Thermostat II […]
-
Flight Logger V2.1
Meinen Flight Logger habe ich bei einem Kurs zu Objektorientierter Programmierung komplett überarbeitet. Er läuft jetzt deutlich stabiler, das Script, welches unter Linux als Service läuft, stürzt praktisch nicht mehr ab und die Daten, die in der Datenbank ergänzt werden, werden nun direkt im Web abgefragt und nicht nur zwei mal am Tag. Um für […]
-
Einweg-Zigarette zerlegt
Auf der Straße habe ich so ein e-Zigaretten-Vapeing-keine-Ahnung-Ding gefunden. Es hat keinen Anschluss, um es zu laden, also eindeutig Einweg. Im Inneren haben ich dann einen 500 mAh Li-Ion-Akku gefunden. Der hat noch 3,6 Volt. Also noch voll ok für verschiedene Dinge. Was für eine Verschwendung, sowas als Einwegartikel zu verkaufen. Und am Ende landen […]
-
Stützen für das Balkonkraftwerk
Seit einigen Tagen sind wir stolze Besitzer eines Balkonkraftwerks. Zwei 400 Watt Module und ein 600 Watt Wechselrichter (upgradebar auf 800 Watt) sollen auf dem Balkon stehen. Wir könnten sie zwar in Richtung Westen aufhängen, doch mit der Standlösung können wir ein Panel nach Süden und eines nach Westen ausrichten, um das in unserer Situation […]